| Category | Sub-category | Variable | Dim. | Type | Range | Description |
|---|---|---|---|---|---|---|
| Global | Scene | scene |
(1,) | D | 6 types | Scene name/identifier |
| Global | Scene | gravity |
(1,) | C | - | Acceleration of gravity |
| Global | Object | render_asset |
(1,) | D | 90 types | Specifies visual appearance |
| Dynamic | Object | position |
(T,3) | C | - | 3D coordinates across time |
| Dynamic | Object | rotation |
(T,3) | C | - | Euler angles across time |

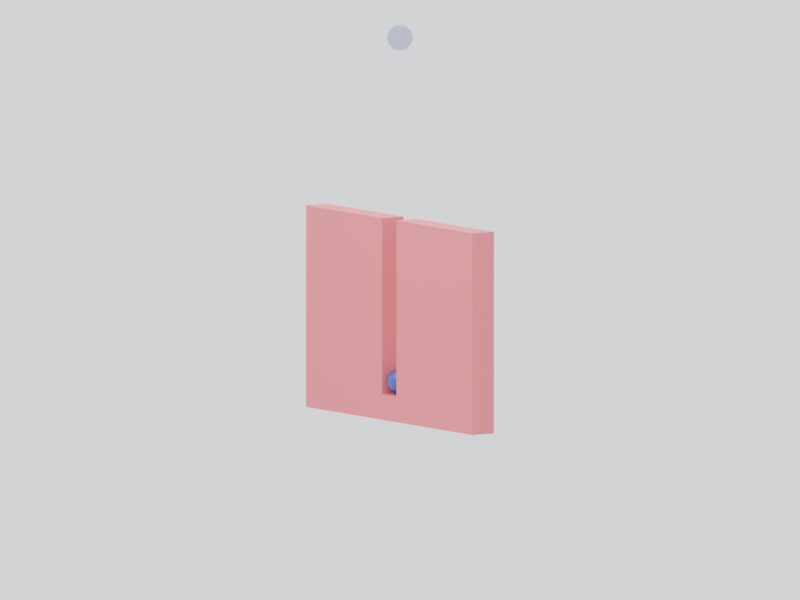
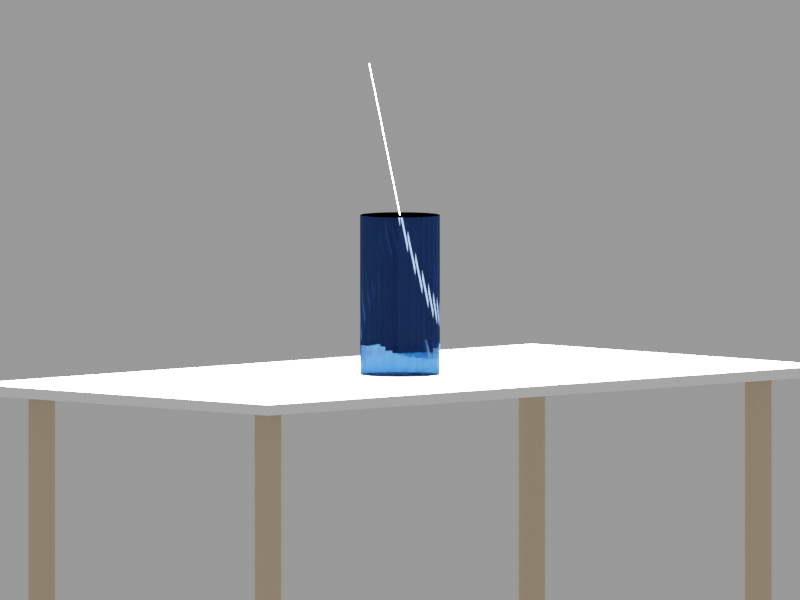
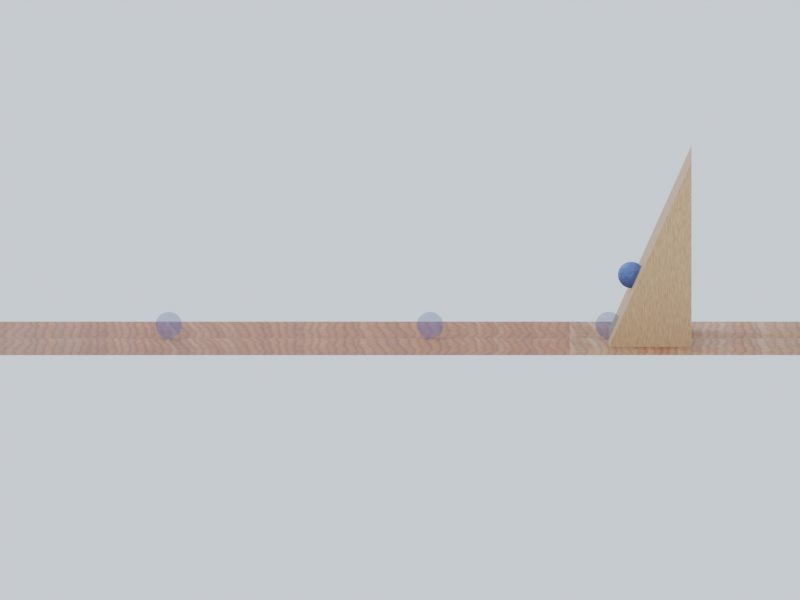
CausalVerse
NeurIPS 2025 (Spotlight)
Benchmarking Causal Representation Learning with Configurable High-Fidelity Simulations